Mさんの話からの類推。既存の資料を調べたりはしてない。セッティングだけで、どう解くかは分からない。[追記 date="翌日"]Mさんに資料をいただきました。色々と違っていた。後で別記事にするかも。[/追記]
2つの主バンドルを定義する。
自明バンドル、構造群は
構造群は
内容:
ネコのモデル
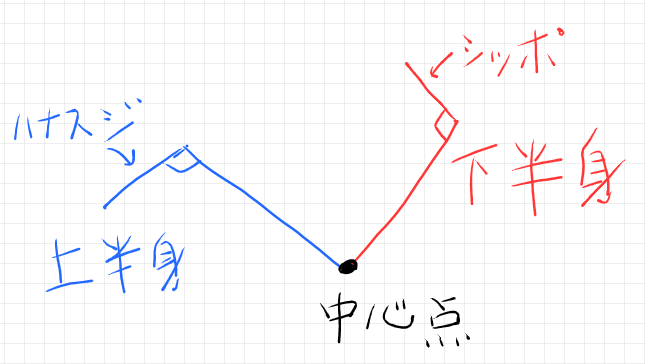
伝統的に2つの円筒でモデル化するようだが、ジョイントされた2つの剛体なら何でもいいので([追記]なんでもよくはない[/追記])、2つのL字形のロッドを使う。片方を(ネコの)上半身(下図の青)、もう一方を下半身(下図の赤)と呼ぶ。中心点からの上半身の線に直行する線をハナスジ(鼻筋)、下半身の線に直行する線をシッポ(尻尾)と呼ぶ。
本物の猫では、顔も尻尾も激しく動かすだろうが、このモデルではハナスジ/シッポが胴体に固定されていて動かないとする。
中心点(ジョイントの所)の位置をネコの位置と約束する。
正規直交フレームと姿勢空間
3次元空間の正規直交フレーム と
を次のように決める。
| 名前 | 説明 |
|---|---|
| e1 | 中心点から出る上半身の矢線 |
| e2 | ハナスジの矢線 |
| e3 | e1, e2 に右手系で直交 |
| f1 | 中心点から出る下半身の矢線 |
| f2 | シッポの矢線 |
| f3 | f1, f2 に右手系で直交 |
の正規直交フレームの全体を
とすると、
には
が作用し、この作用は主作用〈principal action〉になるので、この作用のもとで
は主等質空間になる。
主等質空間としての を(ネコの)姿勢空間と呼ぶ。ネコの姿勢は
-作用で制御可能。
位置空間と主バンドル
を(ネコの)位置空間と呼ぶ。特定の位置のネコが特定の姿勢をとっている状態の空間は、位置空間×姿勢空間
となる。
位置空間への射影 を考えるとファイバーバンドルになる(大域的自明バンドル)。各ファイバーに構造群
が“主に〈principally〉”作用しているから主バンドルになる。
ネコの運動
ネコの位置の変化は写像 で記述できる。各時点での位置だけでなく姿勢も考えると、
で記述できる。
として次の可換図式を満たす。
もうひとつの主バンドル
使うかどうか分からないが; ひねりの情報を落としたネコの姿勢は2本のベクトル で記述できる。これらは単位ベクトルとしておいたので、
。このことから次の写像を作れる。
を決めると、ひねり(体軸の回りの回転)は
なので、上記の写像は構造群
である主バンドルを定義する。
問題における制約
写像 であって、以下の制約を満たすものが存在すればよい。(位置空間
は要らないかも知れない。)
は、逆さまにぶら下げられた状態である。
は、床にちゃんと着地している。
- いくら猫でも無理な姿勢があるだろうから、
で、
は“猫がとり得る姿勢”である。
- 姿勢の変更は腹筋などで行うのだろうが、この変更(
の作用)も猫が実行可能なものである。